TITAN 2022
Page Last Updated: January 5, 2025
Status: Completed
Period: September 2020 - September 2022
Client: HPVDT
Tags: embedded HPVDT KiCad python rpi
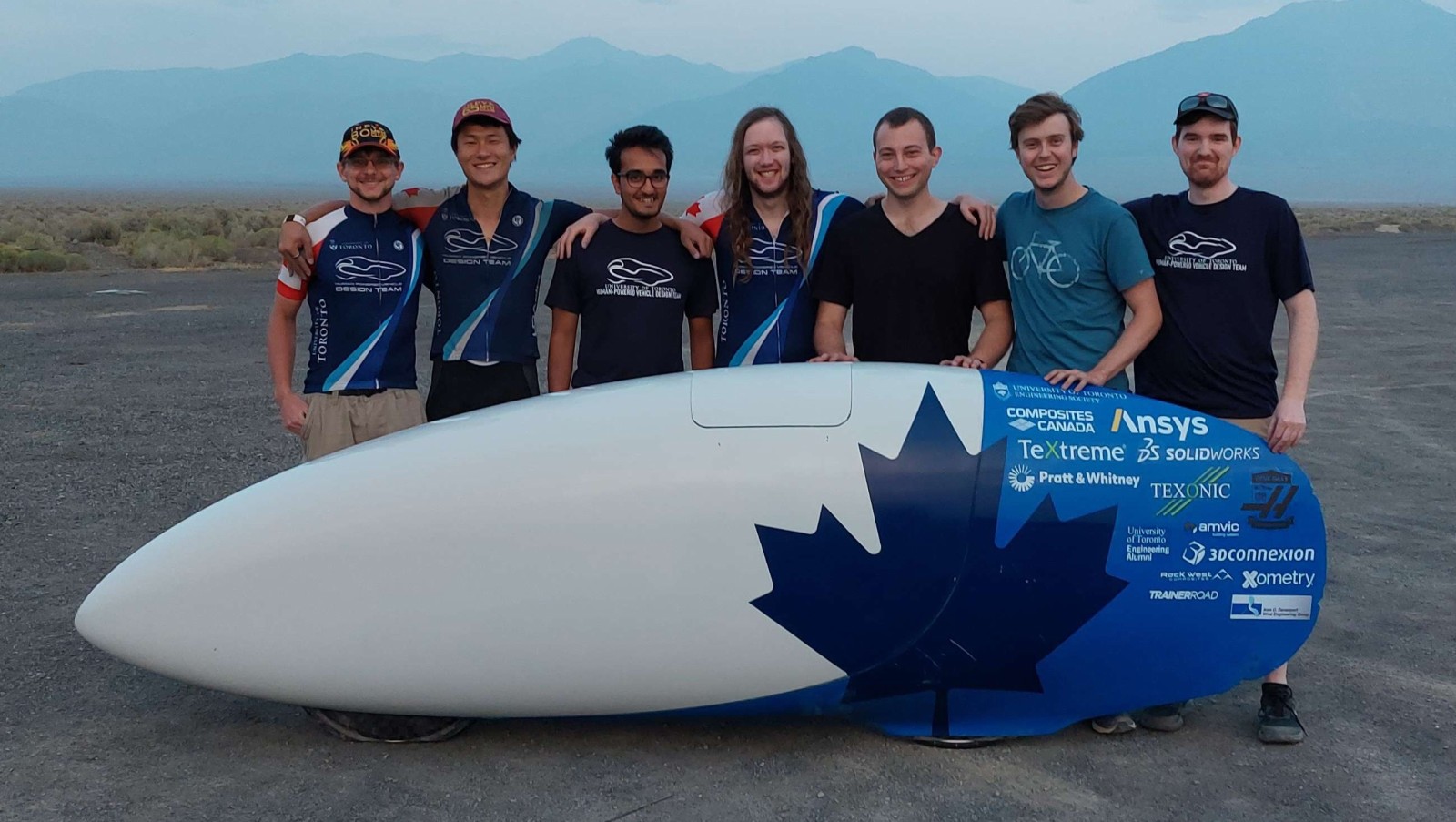
My successfully deployed, much revised video bike system for HPVDT’s speedbike TITAN
This website is for Savo Bajic (me!), covering my projects and work - lots of embedded systems design: from concept to final delivery.
If you’re looking to chat or collaborate drop me a line!

Here are a few of my projects I'm particularly proud of and really want to share.
Page Last Updated: January 5, 2025
Status: Completed
Period: September 2020 - September 2022
Client: HPVDT
Tags: embedded HPVDT KiCad python rpi
My successfully deployed, much revised video bike system for HPVDT’s speedbike TITAN
Page Last Updated: January 5, 2025
Status: In Progress
Started: May 2020
Tags: BLDC drone embedded ESC KiCAD
Making a custom electronic speed controller for my drone’s motors

Page Last Updated: January 17, 2026
Status: Complete
Period: November 2023 - February 2024
Client: The Canadian Department of National Defence via EDL
Led the coding and integration of a prototype amphibious electric vehicle for Arctic operation for the Canadian Armed Forces
Page Last Updated: January 5, 2025
Status: Complete
Period: January 2023 - August 2023
Client: MEng Project for ISML, Intelligent Sensory Microsystem Laboratory, University of Toronto
Tags: Altium IC Multilayer Research ToF
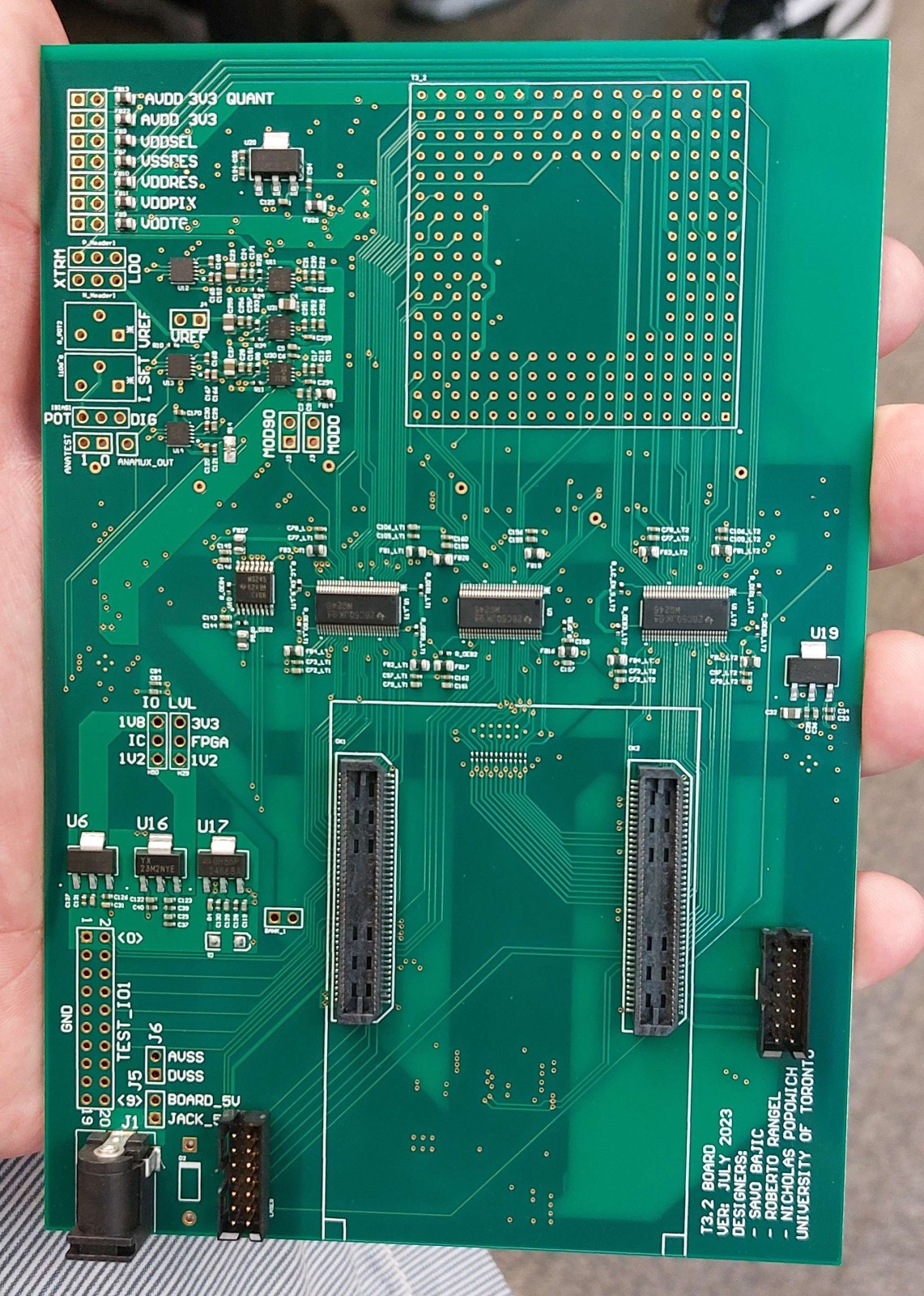
Designed the carrier PCB for one, and Verilog driver code to operate two, experimental Time of Flight (ToF) camera sensors
Page Last Updated: January 5, 2025
Status: Complete
Period: September 2022 - December 2022
Client: ECE1388, VLSI Design Methodologies
Tags: Cadence IC Simulation VLSI
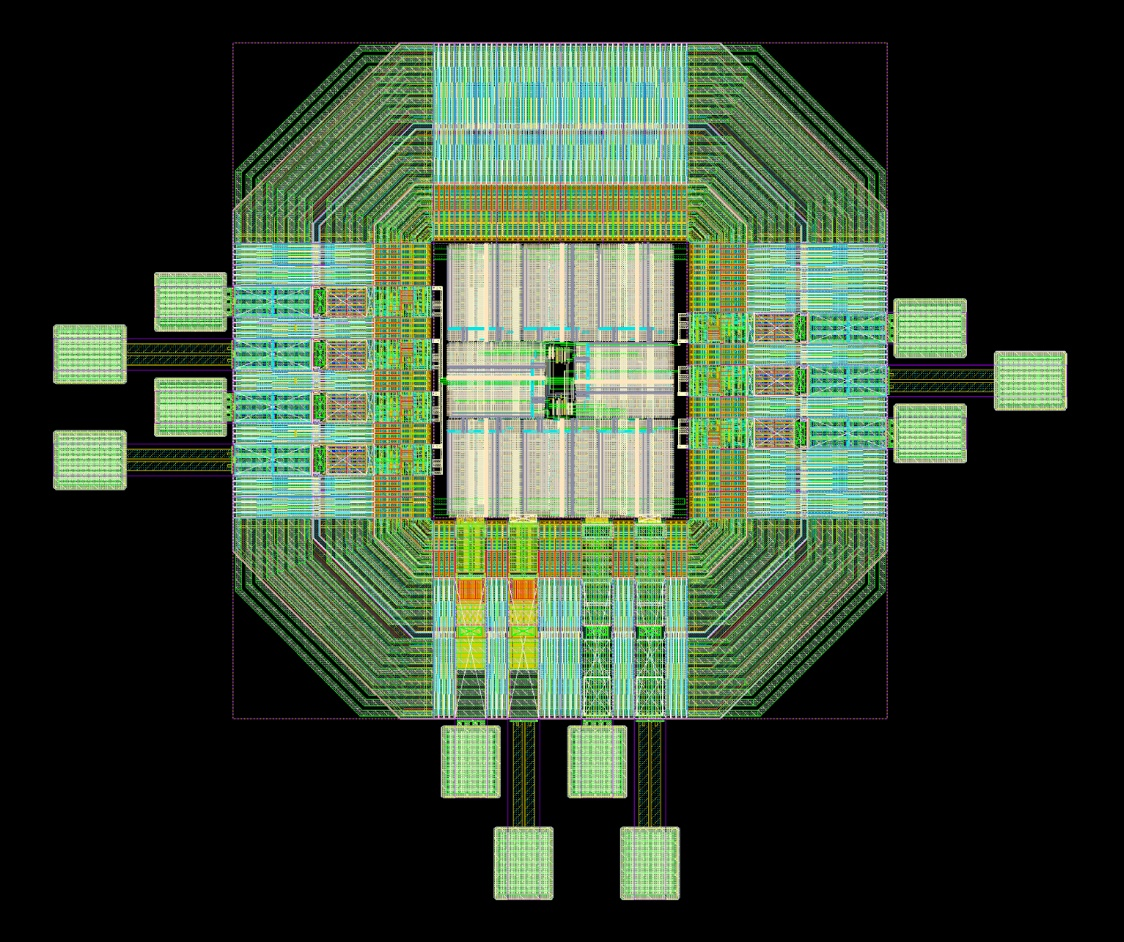
Designed a Hamming Code generator integrated circuit with a classmate over a semester using 65 nm technology in Cadence software.

Page Last Updated: January 5, 2025
Status: Complete
Period: May 2018 - July 2018
Client: IGB Automotive
Tags: IGB LabVIEW PLC robotics validation
Expanded on my basic, single-axis, force feedback system to now monitor and control up to six axes and eased user configuration
These are pages that I have most recently updated. Usually that means meaningful content updates but sometimes it could just be me fixing some spelling mistakes.
Page Last Updated: January 19, 2026
Status: For Sale
Period: November 2023 - June 2025
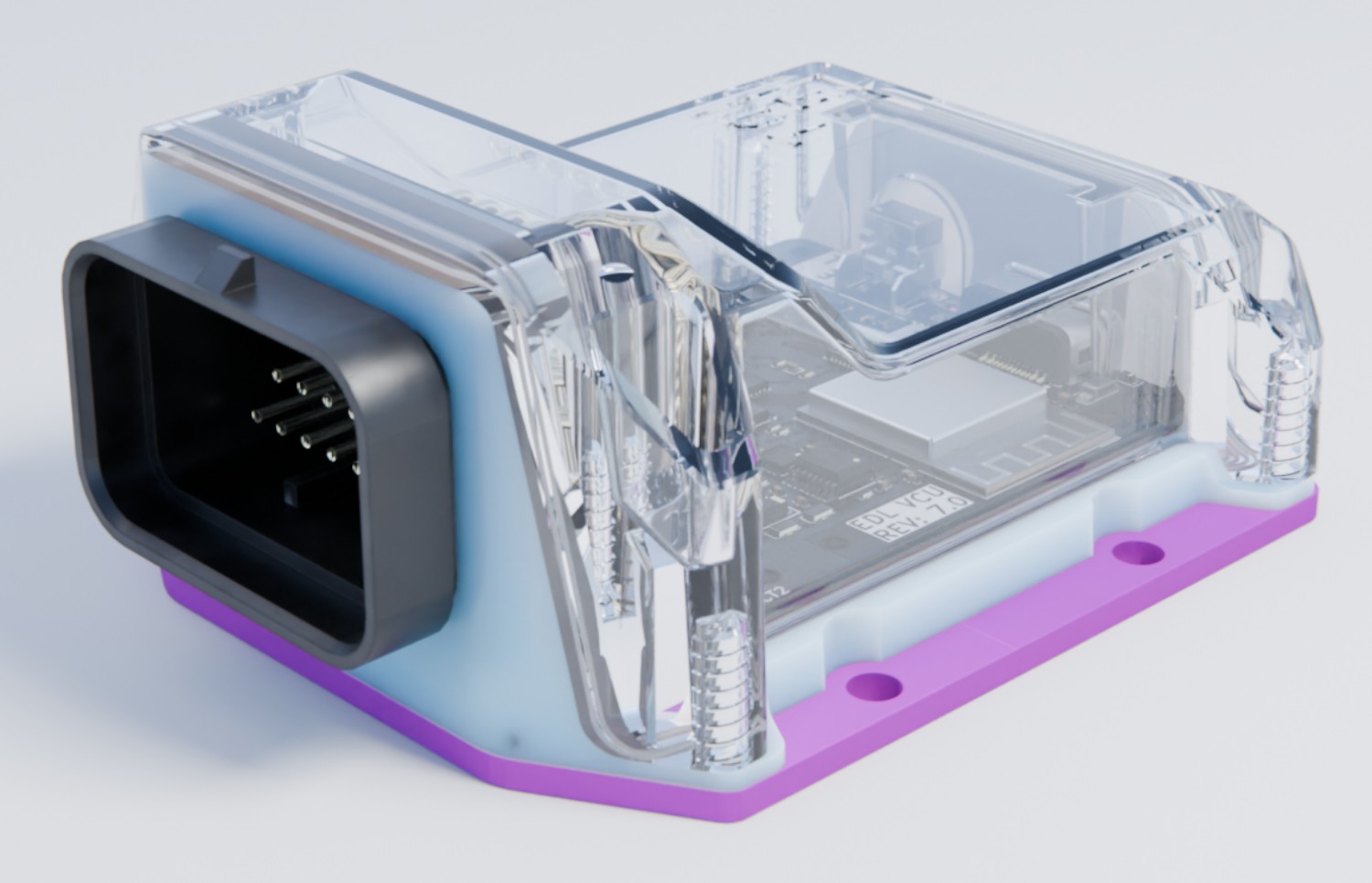
Client: Engineering Design Lab
Tags: EDL EV product design vehicles
Designed a general purpose control unit for small electric vehicles to accelerate their time to market as well as the supporting documentation

Page Last Updated: January 17, 2026
Status: Complete
Period: August 2024 - October 2024
Client: Kara Springer Design via EDL
Tags: art EDL networking
Designed the electronics that powered an art installation for Toronto’s Nuit Blanche 2024 and beyond, synchronizing lights with the artist’s breathing rhythms
Page Last Updated: January 17, 2026
Status: Complete
Period: November 2023 - February 2024
Client: The Canadian Department of National Defence via EDL
Led the coding and integration of a prototype amphibious electric vehicle for Arctic operation for the Canadian Armed Forces
Page Last Updated: August 4, 2025
Engineering Design Lab (EDL)
May 2024 - July 2025
Primary electrical designer for a Toronto-based engineering consulting firm.
Page Last Updated: January 5, 2025
Status: Assembled, in testing
Period: May 2020 - August 2020
Client: HPVDT
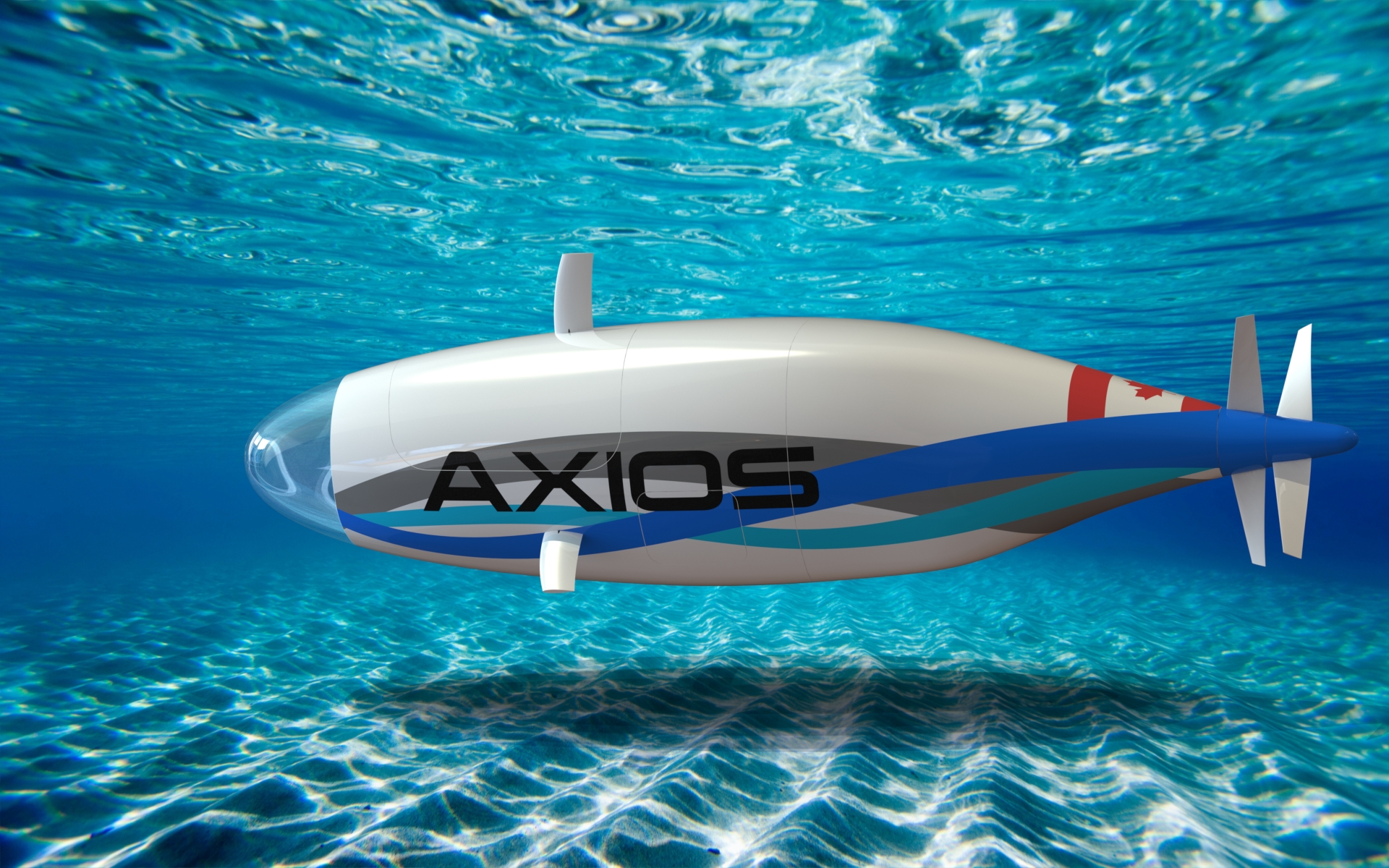
Tags: analog axios embedded HPVDT
Led the design of the rebreather monitoring system for our submarine project
Page Last Updated: January 5, 2025
Status: Complete
Period: January 2023 - August 2023
Client: MEng Project for ISML, Intelligent Sensory Microsystem Laboratory, University of Toronto
Tags: Altium IC Multilayer Research ToF
Designed the carrier PCB for one, and Verilog driver code to operate two, experimental Time of Flight (ToF) camera sensors